Fracture-directed Waterjet Needle Steering: Design, Modeling, and Path Planning
Our paper on fracture-directed waterjet needle steering is accepted to be presented at BioRob 2020 and also to be published in IEEE.
The contributors of this paper are Mahdieh Babaiasl, Stefano Bocelli, and Fan Yang, under the supervision of Dr. John Swensen.
The abstract of this paper is:
Steerable needle technology has the promise of improving outcomes by enhancing the accuracy of different therapies and biopsies, as they can be steered to a target location around obstacles.
Achieving a small radius of curvature and being able to control both radius of curvature and tip travel is of paramount importance in steerable needles to accomplish the increase in efficacy of the medical procedures.
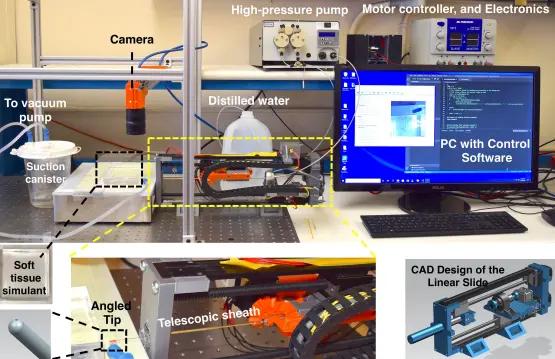
In this paper, we present a new class of steerable needles, which we call waterjet-directed steerable needles, where the underlying principle is to first control the direction of tissue fracture with a waterjet, after which the needle will follow during subsequent insertion.
In this paper, the direction of the tissue fracture is controlled by an angled waterjet nozzle and control of the water velocity, and then the flexible Nitinol needle follows.
It is shown that by changing the velocity of the waterjet and thus the depth of cut, the radius of curvature can be controlled.
A discrete-step kinematic model is used to model the motion of the waterjet steerable needle. This model consists of two parts: (1) the mechanics-based model predicts the cut-depth of waterjet in soft tissue based on soft tissue properties, waterjet diameter, and water exit velocity, and (2) a discrete-step kinematic unicycle model of the steerable needle travel.
Path planning is accomplished through a genetic algorithm, and the efficacy of the waterjet steerable needle is tested for different paths.
The key finding of the paper is that the radius of curvature of the waterjet steerable needle can be controlled by a fixed waterjet tip angle and varying water exit velocity to control the depth of cut.

You can see the full article on waterjet steerable needle system design, modeling, and path planning HERE!
The Software related to the needle insertion controller implemented in C and Python can be downloaded below:
Video below shows the difference between Waterjet Needle and Traditional Needle:
Video below shows the concept of waterjet needle steering: