Sliding Mode Control of an Exoskeleton Robot for Use in Upper-Limb Rehabilitation
Note: The Sliding Mode Control of The Shoulder Rehabilitation Robot project was done during 2011 – 2013 when Madi was a master’s student.

Abstract
In this paper, the mechanical design and control of an exoskeleton robot for shoulder rehabilitation after stroke are presented.
Initially, the mechanical design of a new 3 degrees of freedom (DOF) exoskeleton robot for shoulder joint rehabilitation is presented.
All robot measurements are based on the properties of the upper limb of an adult person.
A new open circular mechanism is proposed for the third joint.
Afterward, direct and inverse kinematics, Jacobian matrix, singular points, and dynamics of the robot are presented.
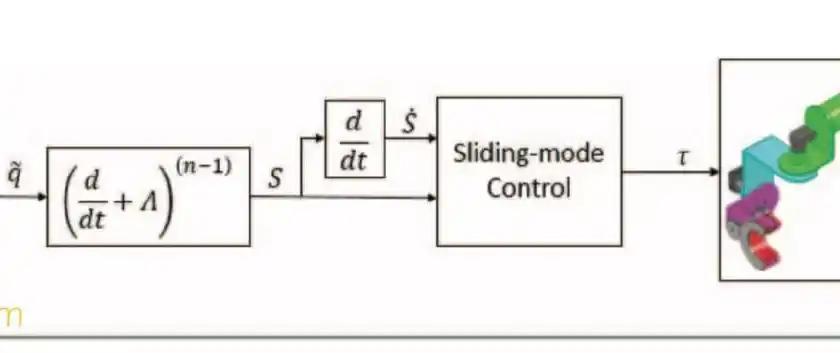
In order to study the ability of the robot to follow the optimized trajectories, a sliding mode controller (SMC) is proposed to track desired trajectories.
In most rehabilitation robots, the attention is on the robot’s mechanical design, so linear controllers are used to controlling the robot.
However, rehabilitation robots are nonlinear in nature and nonlinear control methods are required that can reject uncertainties and are resistant to parameter changes.
SMC is robust due to its nonlinear nature and can reject uncertainties and disturbances applied to the system such as patient’s hand tremor. The parameters of the SMC are tuned using a Genetic Algorithm (GA).
The main advantage of this robot compared to similar systems are being low weight, having a special mechanism for the third joint that solves the known issues associated with long wiring and closed mechanisms, allowing translational degrees of freedom of the shoulder, ease of use, comfort for the patient and the tracking performance of the controllers.
- To see the full-text Click HERE
Here are the files to replicate the project:
- The report of the Thesis: Click HERE!
- Design in SolidWorks: Click HERE!
- Shoulder Rehabilitation System (SRS) Dynamics: Click HERE!
- SRS with Inverse Dynamic Controller Tracking: Click HERE!
- SRS with Lyapunov Based Controller: Click HERE!
- SRS PD Control with Gravity Compensation Regulation: Click HERE!
- SRS PD Control with Gravity Compensation Tracking: Click HERE!
- SRS PID Control: Click HERE!